|
实验装置
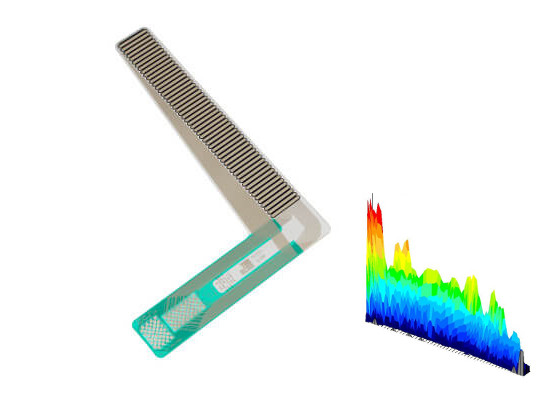
触觉传感器:采用触觉传感器(压力映射传感器5101,Tekscan,South Boston,MA,USA)来获取触觉数据,如图2a所示。该传感器由两个薄的、柔性的聚酯板组成,其具有以不同模式沉积的导电电极。一张纸的内表面形成行图案,而另一张纸的内表面则采用柱图案。这些行和列的交叉处形成了一个传感元件,并在这两个配合片之间放置了一种力敏感材料。行与列之间的间距为2.5 mm,总厚度为0.1 mm。由于该传感器具有柔性、大尺寸、超薄等特点,可以将其覆盖在机器人上,使材料识别更加容易实现。该传感器由44×44个传感元件组成,密度高,能够监测接触表面的压力分布,生成与材料柔度和质地相关的触觉图像,丰富了触觉数据,使机器人能够在短时间内采集到足够的数据。压力被转换成触觉图像的强度,范围从0到255。与人类皮肤相似,通过对触觉数据的处理,可以检测到包括持续向下压力、滑动、物体位置、物体形状和振动在内的全方位信息。
Applsci 09 02537 g002 550图2。测试材料的触觉数据采集(a)触觉传感器;(b)传感器通过运动平台滑过材料表面。(c) 试验材料:(1)泡沫硅橡胶(FSR),(2)海绵,(3)棉,(4)聚氯乙烯(PVC),(5)硅橡胶(SR),(6)橡胶,(7)砂纸(80目),(8)木材,(9)铁(未抛光),(10)陶瓷,(11)铜,(12)丙烯酸。
滑动动作:模仿人类探索未知材料的动态触觉感知[30],在试验材料上设计了一个短时间的滑动动作,在1s内收集触觉数据。对于机器人来说,实现滑动动作比抓取和其他动作更容易;为了安全,滑动动作比按压动作危害小。另外,滑动引起的振动对材料识别是有用的。因此,本文采用滑动作用作为探索过程。此外,1s的滑动时间提高了该方法的快速性。在滑动动作中,传感器以恒定的力穿过材料表面。在我们的实验中,使用线性运动平台(M-403,Physik Instruments,Karlsruhe,Germany)以2.5 mm/s的速度拖动传感器,同时在传感器上放置一个200 g的标准砝码以提供恒定的交互力。拖拽的速度比人类使用的滑动速度慢,因为缓慢的滑动可以防止机器人伤害人或物体。一个200克范围内的交互力会使人受伤或不受伤害。此外,每个滑动动作在材料表面的探测区域不同,增加了触觉数据的鲁棒性。图2b说明了滑动动作。
试验材料:为了使试验材料具有代表性,选取了12种不同质地和符合性的材料。这12种材料是泡沫硅橡胶(FSR)、海绵、棉花、聚氯乙烯(PVC)、硅橡胶(SR)、橡胶、砂纸(80目)、木材、铁(未抛光)、陶瓷、铜和丙烯酸(如图2c所示)。这些材料被分为四类:软粗糙、软光滑、刚性粗糙和刚性光滑,它们涵盖了大多数物体的特性。各材料及其所属类别见表1。
表1。试验材料及其所属类别。
表
3.3条。数据收集和降维
当人的皮肤沿着一种未知的材料滑动时,四种机械感受器相互合作,动态地感知刺激并产生相应的触觉信号[25]。他们感受到的刺激如表2所示。为了收集不同频率的触觉数据,就像皮肤一样,这些数据被记录在100hz,这主要覆盖了机械感受器感知到的刺激的频率范围。在此频率下,传感器以2.5 mm/s的速度在材料上滑动1s,滑动动作后传感器可记录100张触觉图像。然而,高密度传感器在每次勘探中产生193600个维度的数据。为了有效地处理数据,设计了三个特征来表示图像,并计算了它们的时间序列以减少数据量。第一序列Sa包含100个触觉图像的区域,第二个序列Sv包含100个触觉图像的方差,第三个序列Ss包含100个触觉图像中的力的总和。在数字上,机智 |